本站店铺有售~ http://tzz.quwj.com
介绍
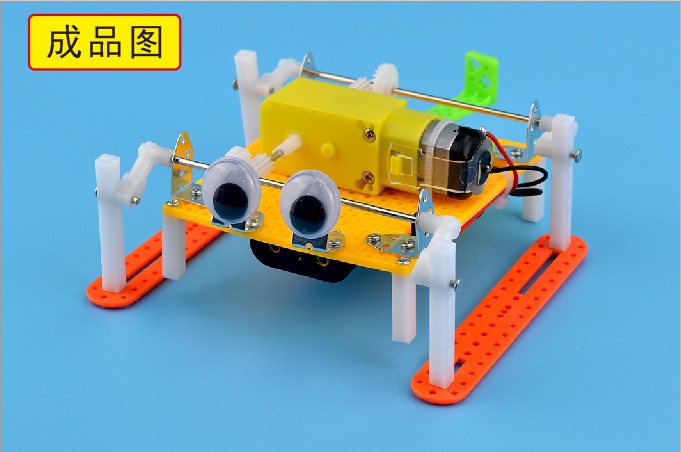
漫步机器人是由一系列通用玩具元件精心构建设计而成的机器人模型,锻炼动手能力的益智好玩具。安装完成后,可以模仿机器人走路,双脚交替行驶,传动平稳,外形逼真。
科学原理
漫步机器人使用130 减速马达作为动力装置,采用了主齿与冠齿的垂直传动设计,马达的双轴输出可带动前后4个摇杆同时转动。漫步机器人具有较好的机动性,对不平地面的适应能力十分突出,可在地面上选择最优支撑点,从而轻松地通过松软地面或者跨越比较大的障碍。
制作步骤
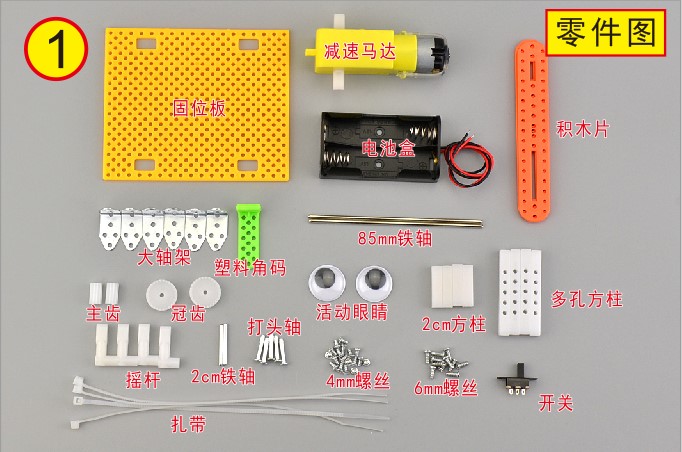
1、 认识各种零件,注意区分各个零件的规格及型号!
2、 连接电池盒、开关、减速马达。然后在减速马达两端安装2cm铁轴和主齿轮。

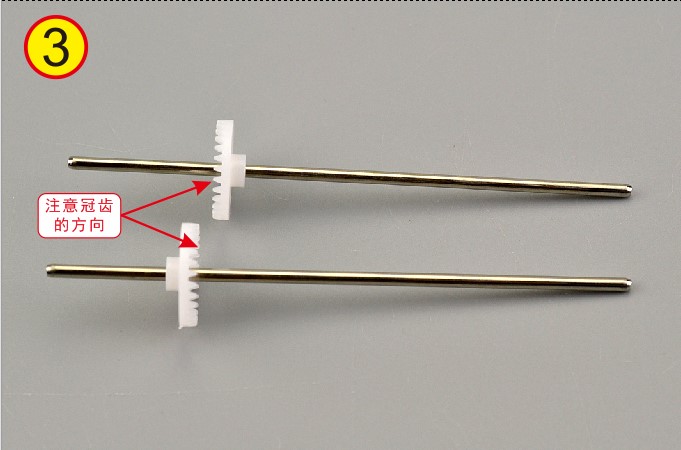
3、 在长铁轴上安装冠齿(冠齿孔较紧,可借助工具按压或者敲进去)。注意两个冠齿的方向。
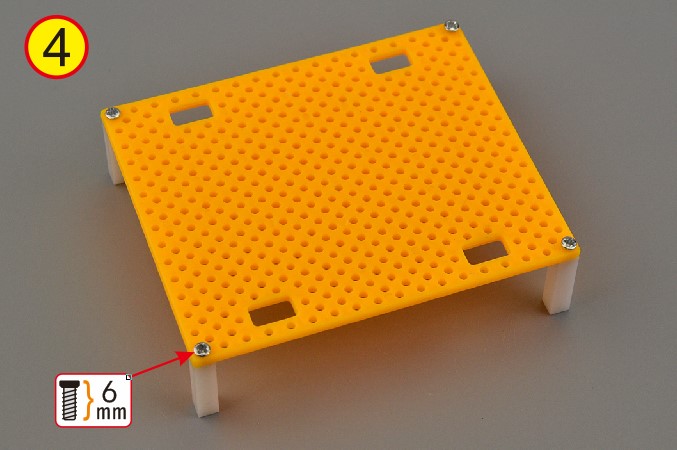
4、 在固定板的四个角使用6mm螺丝固定2cm方柱。
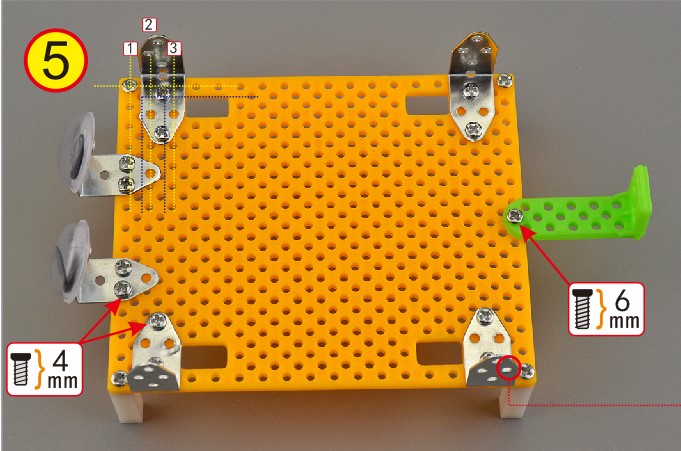
5、 在固定板如图位置安装大轴架、塑料角码、活动眼睛(注意对准参考线找孔位和螺丝的型号)。
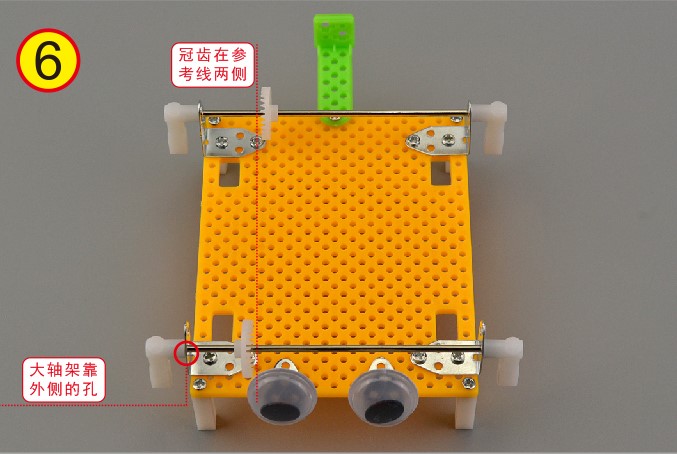
6、 在大轴架外侧的孔穿入铁轴后安装摇杆(注意冠齿的朝向,两个冠齿分别在参考线两侧,建议多次手动调试)。
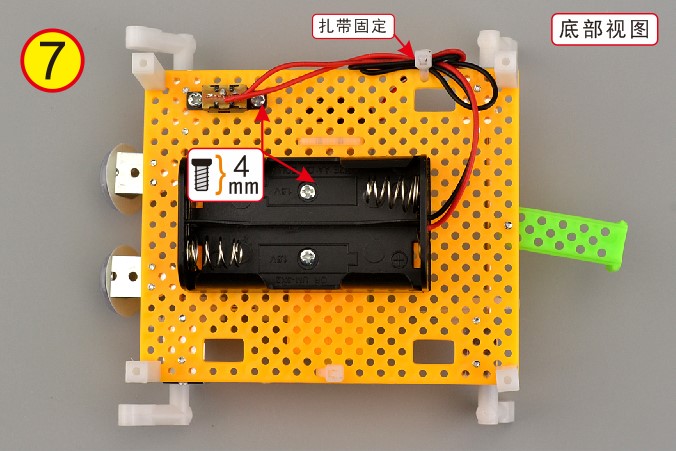
7、 在固位板底面使用4mm螺丝安装电池盒、固定开关。
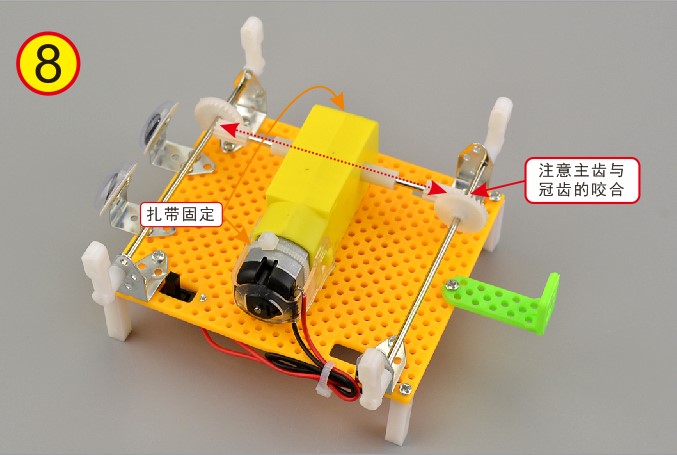
8、 在固位板正面安装减速马达,注意齿轮的咬合(可通过调节冠齿的位置来调整齿轮的咬合力度,建议多次调试)。
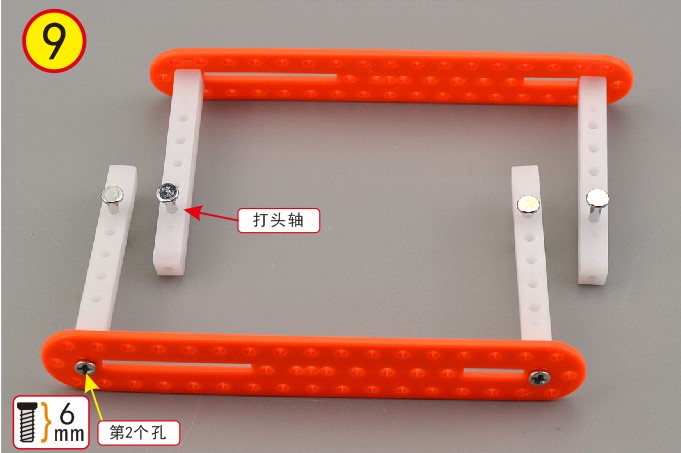
9、 在积木片第2个孔安装多孔方柱,在多孔方柱上最上面的孔安装打头轴。
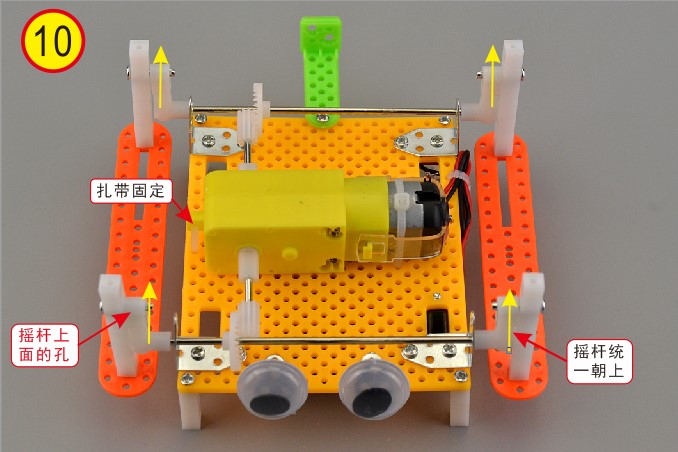
10、 将多孔方柱上面的打头轴穿入摇杆上面的孔,制作完成(通电之前需要将4个摇杆统一朝上)。
科学延伸
机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制作的原则纲领行动。它的任务是协助或取代人类的工作,如:生产业、建议业、或是危险的工作。