本站店铺有售~ http://tzz.quwj.com

介绍
爬虫机器人由一系列通用玩具元件精心构建设计而成的机器人模型,具有科技性与趣味性,锻炼动手能力的益智好玩具。安装完成后,可以在多种路面:木质地板、草地、石头路面都可以轻松前行!
科学原理
爬虫机器人采用了仿生设计,除了两只萌哒哒的眼睛和真正的爬虫很像,连他的脚也采用了爬行运动形式,打开开关后减速马达带动爬行臂交互转动,让“小虫”呈现爬行状态。改变两个交互臂的相对角度,可实现不同的爬行效果哦。
制作步骤
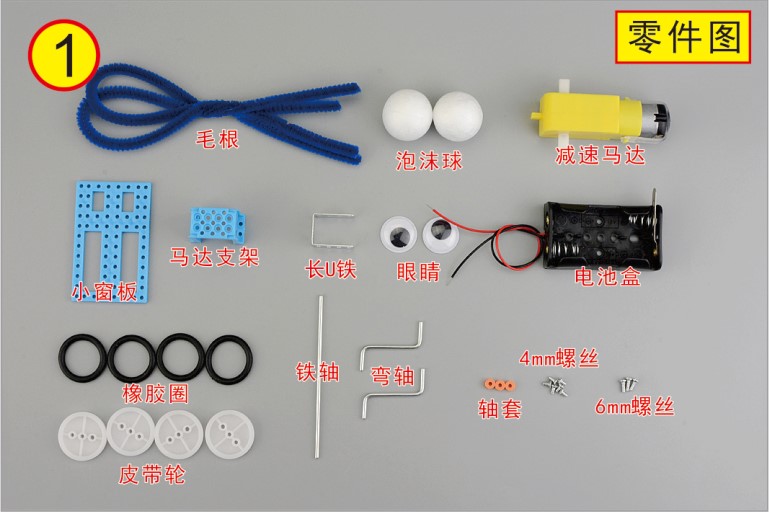
1、 认识各种零件,注意区分各个零件的规格型号!(自备螺丝刀、剪刀、打火机等工具)
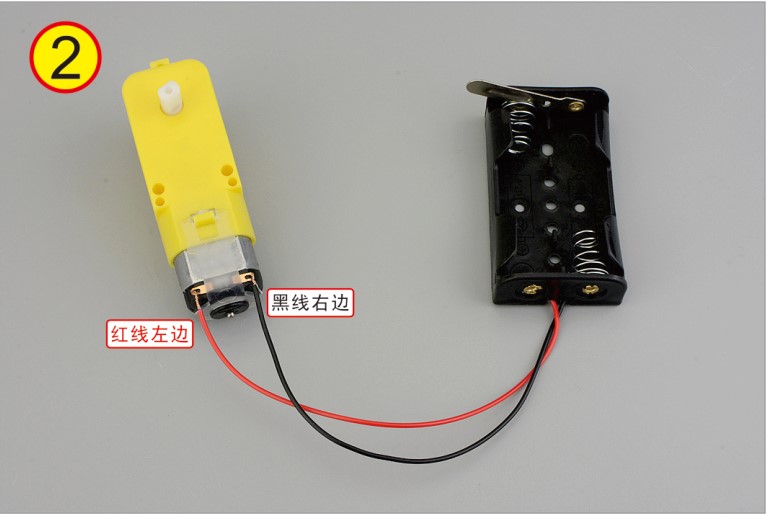
2、 将电池盒的导线头剥出1cm(也可使用打火机烤熔后剥线)。红线接马达左边,黑线接马达右边。
3、 用6mm螺丝和马达支架将马达安装在小窗板上。

4、 将橡胶圈套在皮带轮上。

5、 先在铁轴上穿入长U铁并用轴套固位(较紧、需用力,注意留1mm左右间隙),然后安装车轮。在弯铁轴上安装车轮。

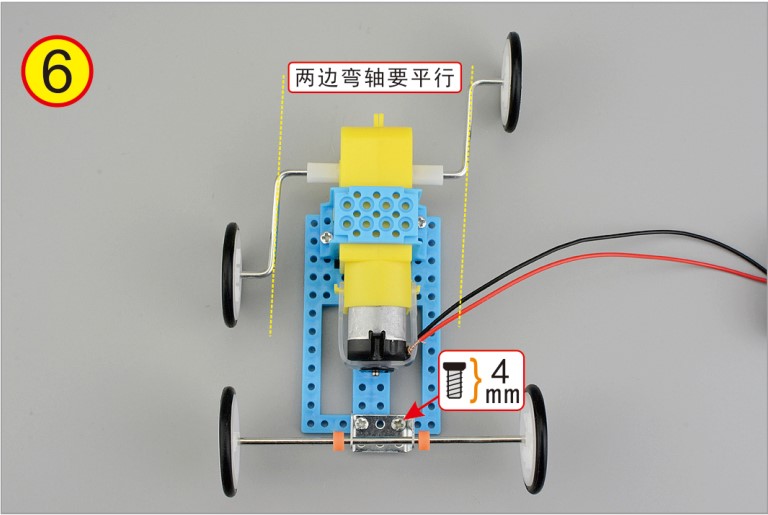
6、 将铁轴车轮组件用4mm螺丝固定在小窗板上,在马达上安装弯铁轴及车轮(注意:两边的弯轴要平行)。
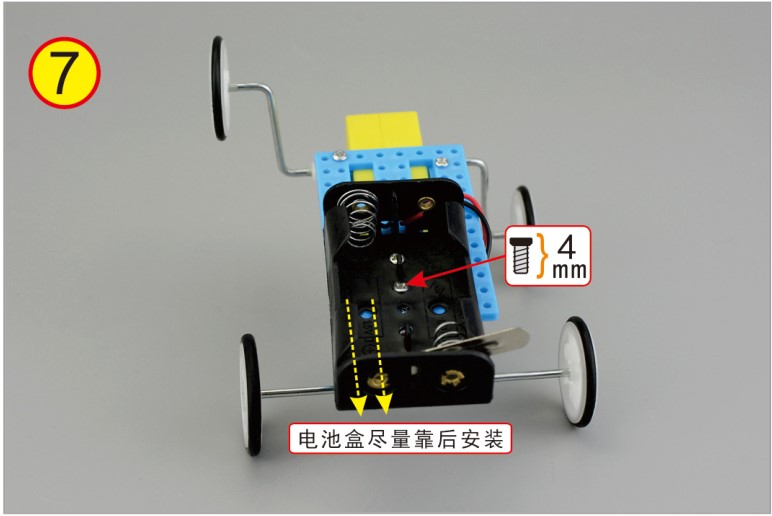
7、 用4mm螺丝固定电池盒,电池盒尽量靠后安装,以使爬虫保持平衡(注意电池盒方向,闸刀一端向后)。
8、 在泡沫球上切出小平面,撕掉眼睛后背胶并粘贴,然后将毛根对折剪开。

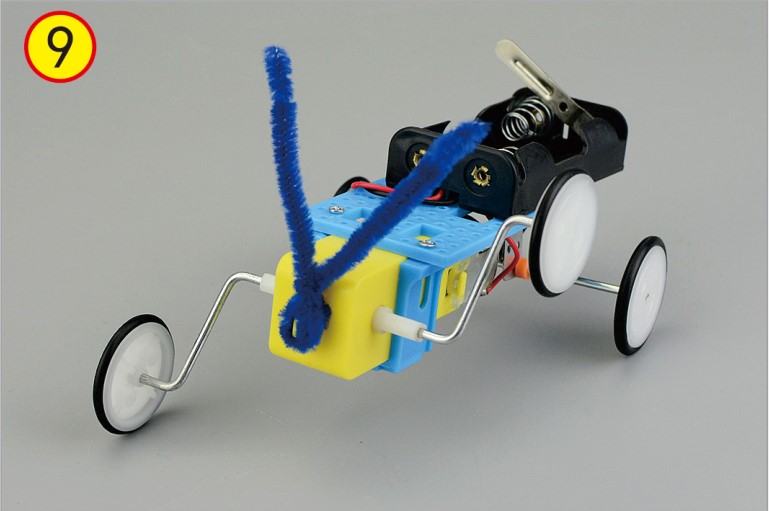
9、 如图将一截毛根穿过马达前面的孔,对折后拧几圈固定紧。
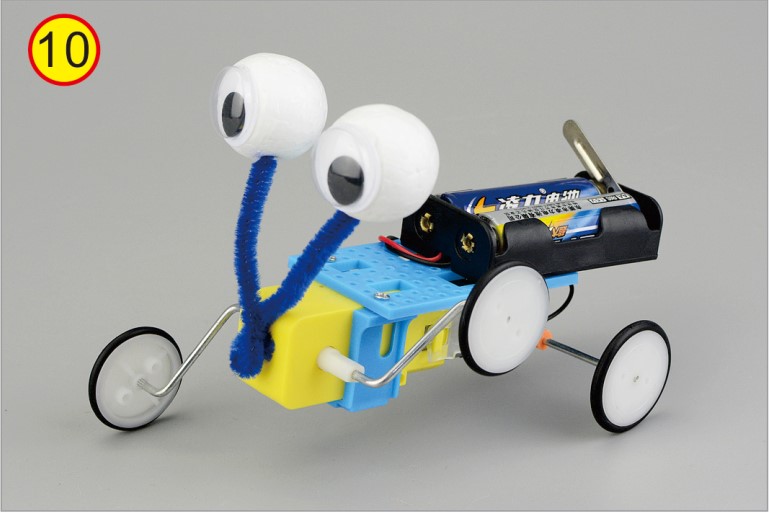
10、 将爬虫的眼睛插在毛根上面,制作完成,然后安装两节5号电池测试!
科学延伸
改变两个交互臂的相对角度会有什么变化呢?会有其它爬行效果吗?